A scalable implementation of matrix multiplications in O'Caml
- by Gerd Stolpmann,
2008-05-12
O'Caml seems not be recognized as a programming language where it is
easy to parallelize tasks. Recently, there was a heated discussion on
caml-list about this subject, and people complained that the memory
management of O'Caml does not work well for multi-threaded programs.
Actually, the memory manager enforces that only one O'Caml thread can
execute code at any time, so that there is no way to make efficient
use of multi-core CPUs. Well, there are ways around this limitation,
and in this article I'll show how to multiply matrices in a distributed
system. We don't use multi-threading, but multi-processing which means
that the threads of execution don't have easy access to shared memory.
For communication and synchronization we use remote procedure calls
which can basically do the same as shared memory, but at higher
cost. Most important, however, is that the restriction of the O'Caml
memory manager no longer applies: The processes are independent, and
every process has its own manager.
In order to tackle problem we need a way to break down the
algorithm so that the running processes don't have to synchronize with
each other often. This is very easy for the matrix multiplication
(but may be more complicated for other problems): Every cell of the
result matrix is the scalar product of one column of the first input
matrix with one row of the second input matrix. Thus the cells can be
computed independently, and one only has to take care that all
processes have access to the input matrices, and that the processes do
not interfer with each other when writing the results.
The tools
In this solution of the problem we use the toolset provided by Ocamlnet.
It includes a mature and quite efficient implementation of SunRPC
we'll use for interprocess communication. Furthermore, there is Netplex
for creating and managing multi-process servers. The plan is to create
an RPC service for multiplying matrices that can take advantage of
several cores and that can even run in a compute cluster.
The Netplex/SunRPC combination is quite powerful. Basically, a SunRPC
server accepts TCP connections, and executes the incoming RPC calls.
With our tools we can choose whether we want to have a single process
that processes all connections, or whether we want to create new
processes for every connection. Obviously, the latter is the way to go
for doing the hard computation work, because O'Caml allows us only to
take advantage of several cores by running the code in different
processes. The single process choice is also useful, namely for
controlling the computation, i.e. for synchronization. In this example
we'll use both types of process management.
SunRPC is a quite aged standard for doing remote procedure calls.
RPC is typed message passing, that means we cannot only pass strings
from one process to the other, but values of all types of the
interface definition language. In SunRPC we have ints, floats, strings,
arrays, options, records ("structs"), and variants ("unions").
Furthermore, RPCs are usually "two-way" messages: Input messages are
always replied with output messages.
The components
We have two components. One is called the "controller" and manages the
work to do. Actually, the controller defines the outer loops of the
algorithm. Furthermore, there is the "worker" component. The worker
can be instantiated several times (and runs then in several processes).
It implements the inner loop of the algorithm that runs in parallel.
The general idea is that the controller triggers the workers
when a new multiplication is to be done, and that the workers are
themselves repsonsible for getting the input data, and for getting
the tasks to execute. In the SunRPC IDL this looks like:
program Controller {
version V1 {
void ping(void) = 0;
dim get_dim(which) = 1;
/* Workers can call this proc to get the dimension of the matrix */
row get_row(which,int) = 2;
/* Workers can call this proc to get a row of the matrix. The int
is the row number, 0..rows-1
*/
jobs pull_jobs(int) = 3;
/* The controller maintains a queue of jobs. This proc pulls a list
of jobs from this queue. The int is the requested number.
*/
void put_results(results) = 4;
/* Put results into the result matrix. */
} = 1;
} = 2;
program Worker {
version V1 {
void ping(void) = 0;
void run(void) = 1;
/* The controller calls this proc to initiate the action in the worker.
When it returns, it is assumed that the worker is completely
finished with everything.
*/
} = 1;
} = 3;
(There is also a program Multiplier with program number 1 we'll show later.)
These are the procedures the two components expose. When a multplication
is to be done, the order of actions is as follows:
- We assume the controller has the input data. The controller calls
the "run" RPC of all workers to trigger them.
- The workers now fetch the input data from the controller by
calling "get_dim" and then "get_row" until they have all input
values.
- The workers now run jobs from the controller by repeatedly calling
"pull_jobs", then executing the jobs, and finally transmitting the
results back
to the controller by invoking "put_results". The workers can pull
several jobs at one, and they can put several results at once.
This reduces the relative costs of the RPC overhead per
job.
- The workers are done when there are no more jobs, i.e. the list
of jobs pulled from the controller is empty. Now they can pass
back the result message of "run" to the controller.
Note that the controller must be able to do several things in an
overlapped way: After it has sent the input messages to the "run" RPC
of the workers it must be responsive and accept incoming RPC calls
from the workers. Finally it must wait until all result messages from
the "run" RPCs have arrived. Ocamlnet's RPC implementation supports
such overlapped RPC execution. (Note that Sun's original implementation
does not support this!)
The Multiplier program is just another interface of the controller.
It is the public interface used by the client of the multiplier:
program Multiplier {
version V1 {
void ping(void) = 0;
void test_multiply(int,int,int) = 1;
/* Creates a test matrix with random values and multiplies them.
Args are: (l_rows, r_cols, l_cols = r_rows)
*/
} = 1;
} = 1;
The implementation
The complete source code is available here:
It will also be available in future releases of Ocamlnet, but for now
it is only accessible via Subversion.
Of course, using a distributed approach creates a lot of coding
overhead. Compare with the direct implementation in simple.ml (also
in this directory): The multiplication algorithm counts there only 9
lines of code. Compared with that we had to develop a lot of
additional stuff: 389 lines for the distributed implementation. This
is the price we have to pay in terms of coding effort.
Netplex requires a configuration file, here mm_server.cfg. Basically,
the file lists the components that are supposed to accept incoming
connections. Here, it looks like:
netplex {
...
service {
name = "mm_controller";
protocol { ... };
processor {
type = "mm_controller";
worker { host = "localhost"; port = 2022 };
worker { host = "localhost"; port = 2022 };
};
workload_manager { ... };
};
service {
name = "mm_worker";
protocol { ... };
processor {
type = "mm_worker";
controller_host = "localhost";
controller_port = 2021;
};
workload_manager { ... };
};
}
We have omitted boring parts ("..."). We configure the mm_controller that
connects with two workers, both reachable over TCP port localhost:2022,
and the mm_workers talking to the controller over port
localhost:2021. By including the same worker port twice in the list
of workers, two independent connections are created, and because of the
worker configuration two processes are started. (This is configured in the
omitted workload_manager block.)
Netplex starts exactly the components it finds in the configuration
file, even if more components are implemented in the code. This is quite
useful, because the same binary can be used for different setups.
In this example, we could run the multiplication server on host X with
both controller and workers, and on host Y with only the workers.
Some numbers
I've done some performance tests on a Opteron 2212 system with 2 CPUs
and each CPU has 2 cores (i.e. 4 cores in total). The tests were done
in 64 bit mode and ocamlopt-compiled programs. The interesting
question is not the total performance, but how much overhead we have
by the message passing, and how scalable the system is.
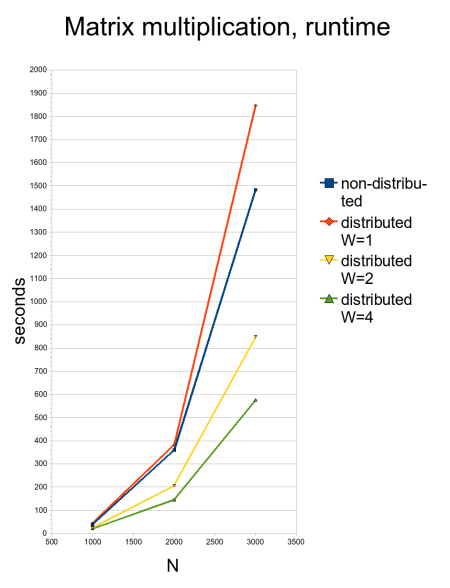
The test is to square an NxN matrix of random numbers, for N=1000,
N=2000, and N=3000. This has been done with the non-distributed version
of the multiplation (simple.ml), and with the distributed version and
W workers, for W=1, W=2, and W=4.
What we expect is that for larger input matrices the relative cost
of message passing drops, because we have to transfer the input matrix
only once for every worker, and the result matrix only once in total,
but the computation time for the multiplication is O(N3)
compared to O(N2) for message passing.
Here are the runtimes, as table, and as diagram:
| Test |
N |
Runtime (seconds) |
| Non-distributed |
1000 |
38.61 |
| Non-distributed |
2000 |
359.765 |
| Non-distributed |
3000 |
1483.759 |
| Distributed, W=1 |
1000 |
45.174 |
| Distributed, W=1 |
2000 |
382.874 |
| Distributed, W=1 |
3000 |
1847.225 |
| Distributed, W=2 |
1000 |
24.407 |
| Distributed, W=2 |
2000 |
206.426 |
| Distributed, W=2 |
3000 |
849.089 |
| Distributed, W=4 |
1000 |
20.842 |
| Distributed, W=4 |
2000 |
144.718 |
| Distributed, W=4 |
3000 |
576.02 |
Not bad, right? The time spent for message passing seems to be acceptable.
If you compare the non-distributed time for N=3000 with the time of the
distributed system and one worker, the overhead is approximately 25% of
the total runtime.
For larger W the overhead for the initial transfer of the input
matrices increases - they have to be copied to every worker. The
algorithm can be improved here, because the controller process becomes
soon the bottleneck as it has to copy the matrices for every worker.
Alternatively, the matrices could be spread among the workers by the
workers themselves in order to get a better degree of parallelization
during the transfer phase.
As last, fun test I started workers on three nodes so that in total
10 cores were available (I couldn't do more because I did not find more
idle systems in Wink's cluster). I got a runtime of 349 seconds for
N=3000. As the cores were not identical, this does not tell us much
except that we really can do it over the network, and that this
multiplier really takes advantage of a cluster.